Introduction
This paper will be based on a Silver Fox D1 sUAS risk management
process for a combat ISR mission in Afghanistan. Not all risks were identified and evaluated,
only a sampling was used to represent the process.
Preliminary Hazard List (PHL)
The Preliminary Hazard list is used to identify risks to flight
operations. Appendix A shows the
Composite Risk Management (CRM) worksheet with the hazards identified. Many of these hazards are centered on the
take off and recovery of the aircraft.
These are critical phases that are crucial for mission success and like
any aircraft are the most dangerous phases of flight. The Silver Fox has a small launcher than can
easily be turned into the wind as needed without a lengthy delay to flight
operations. To maximize safety and the
chance of operational success a launch and recovery site should be found where
there a wide range of takeoff and landing directions available.
During landing each landing direction has to be surveyed and
leveled and cleared for safe recovery. A
thorough site survey to find a launch and recovery area where multiple landing
areas are available to meet the prevailing winds of the area is vital. High Density Altitude (DA) can have a large
impact on flight operations especially if the aircraft engine performance is
not optimal. Weight and DA takeoff
limits can be severely limited with poor engine performance so this is a very
important due to possible aircraft damage if takeoff is attempted outside of
system limits.
The risks are higher during combat missions especially if an enemy
presence is known. While the Silver Fox
has no Aircraft Survivability Equipment (ASE) it is very quiet and small making
it easy to avoid detection with appropriate planning.
Preliminary Hazard Assessment (PHA)
The PHA provides an initial risk assessment value to show what
level of risk each particular hazard presents to flight operations. Appendix A shows the Composite Risk Management
worksheet as well as the Risk Assessment Matrix which shows how to categorize
each hazard with an initial risk assessment value.
Operational Hazard Review and
Analysis (OHR&A)
The CRM worksheet in Appendix A also show the OHR&A. Each hazard is evaluated to find mitigating
factors that can reduce the risk value for hazard. These are steps that can be taken at all
levels and implemented when needed to reduce the risk assessment to an
acceptable level. After the mission is
flown the hazards and their mitigation steps are evaluated to decide whether
they were effective or not. If they
steps were effective they can remain in place.
If they are not effective or only partially effective they can be
modified or changed completely as needed.
Operational Risk Management Assessment Tool
The ORM tool that was used for this mission takes into account all
factors that may effect the mission.
These factors include weather considerations at takeoff, mission
altitude, and landing. It also takes
into account crew factors such as experience, training level and crew
rest. It also looks at aircraft
configuration, night or day mission, and whether or not new equipment or
software is being used. After evaluating
all of these factors and assigning the appropriate risk value an overall risk
value is then tabulated to provide the risk level which in this case was
Low. The ORM also identifies the
appropriate mission approval authority.
Appendix A.
Silver Fox D1 CRM Worksheet
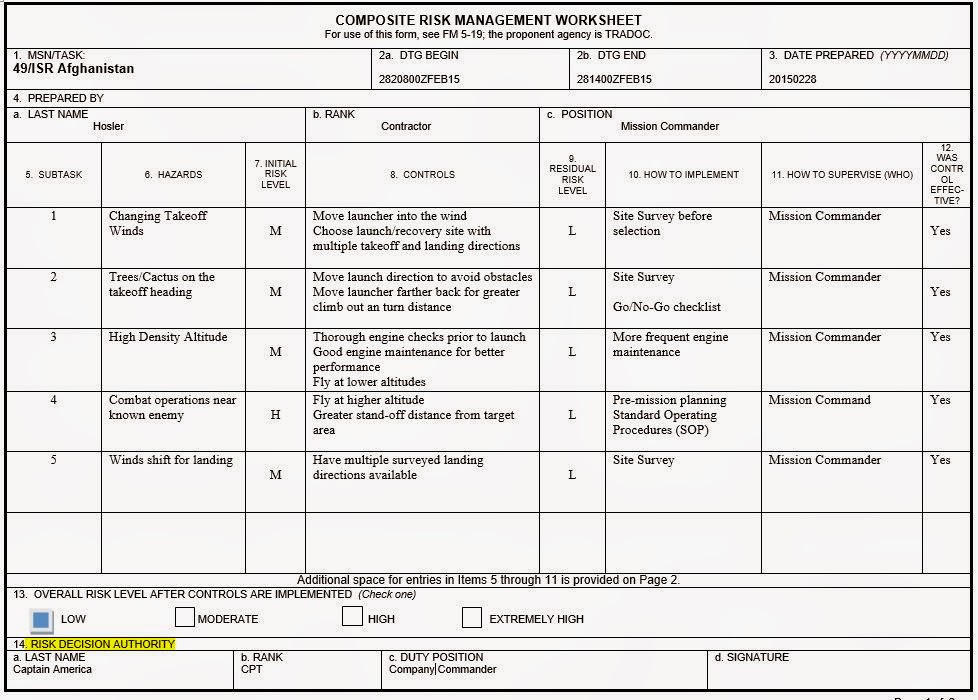

Figure 1. This figure show the CRM
worksheet that encompasses all of the steps for the process. The identified hazards are only a
representative example. (Department
of the Army [DA], 2014)

Figure 2. This figure shows the CRM matrix used
to classify and quantify risks and risk mitigation factors. (DA, 2014, table 3-3)
Appendix B.
Silver Fox D1 Operational Risk Management Worksheet

Figure 3. This figure shows the Operational
Risk Management or Risk Assessment Worksheet for the Silver Fox D1 mission.
10508871



